Die meisten denken an Schweißbrenner und Nagelpistolen, wenn es um Fertigungstechniken geht. Die wenigsten wissen, wie viel Klebstoff in der modernen Fertigung verwendet wird. Industriekleber ist wasserdicht, stark und leicht und damit die perfekte Lösung für Nähte in allen Bereichen – vom Auto bis zum Flugzeug.
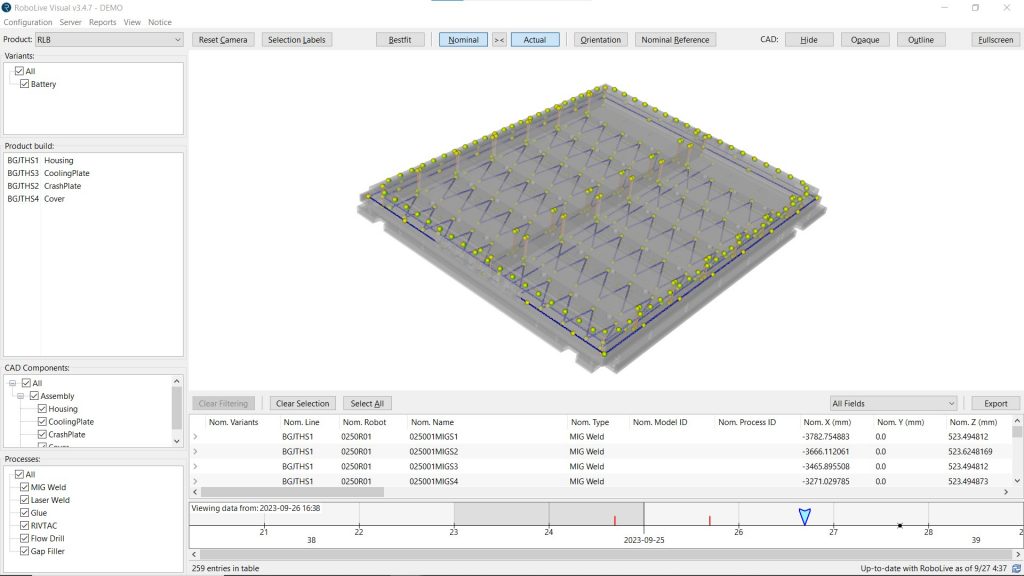
Natürlich muss etwas so Wichtiges möglichst präzise aufgetragen werden. Während ein Werkstück von einem Roboter festgehalten wird, trägt ein anderer Roboter mit einer speziellen Düse den Klebstoff entlang bestimmter vorprogrammierter Linien auf. Der Code dafür enthält auch Anweisungen zur Einstellung der Klebstoffmenge oder der Geschwindigkeit, mit der der Klebstoff aufgetragen wird – Spezifikationen, die als Parameter bezeichnet werden.
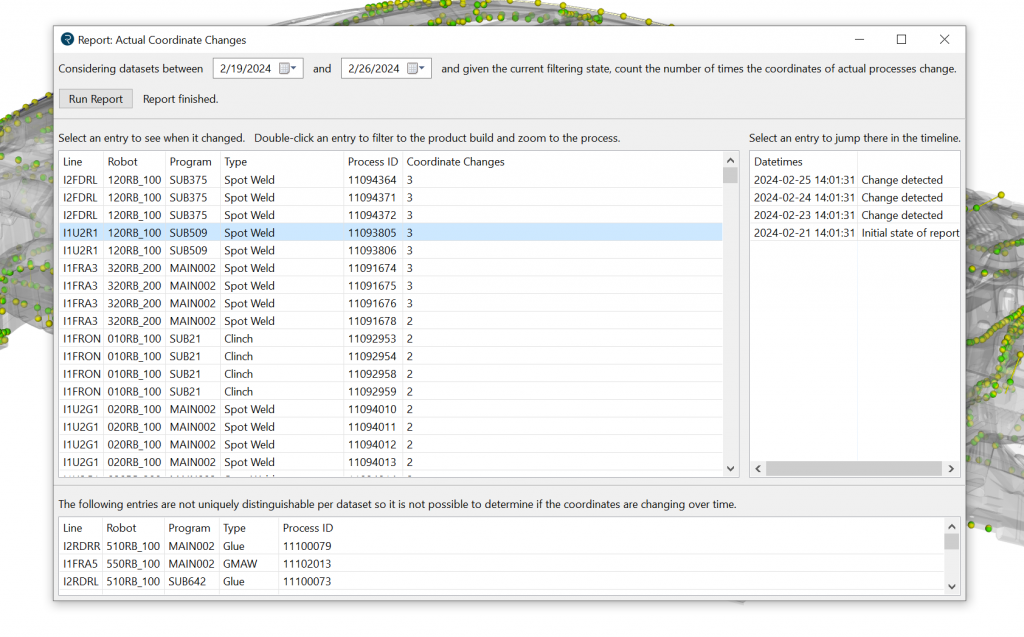
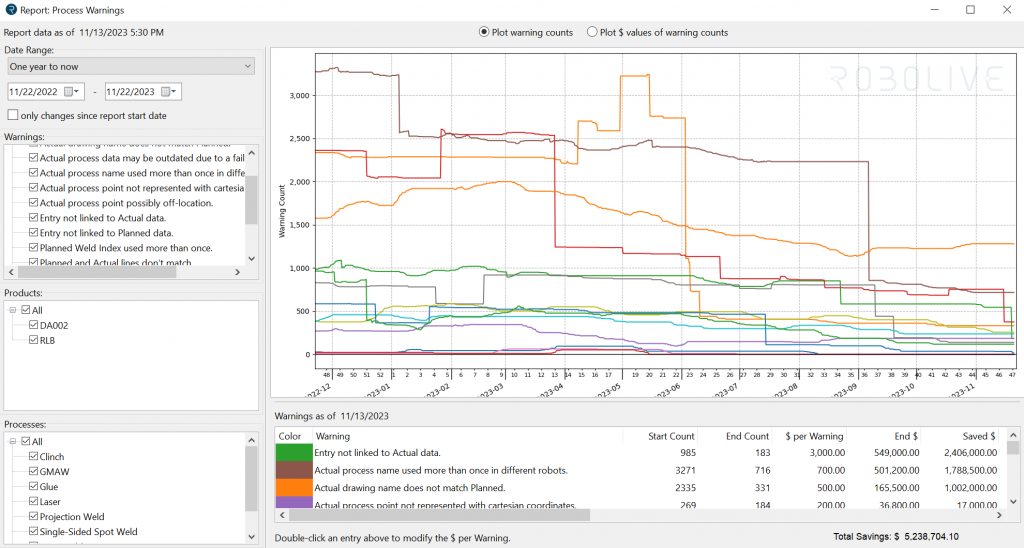
Genau wie die Bewegungsbahnen werden auch die Klebstoffparameter Schritt für Schritt in die Robotersteuerung einprogrammiert. Das ist eine aufreibende und vor allem fehleranfällige Arbeit – und außerdem ist es schwierig, die Parameter auf ihre Richtigkeit zu überprüfen, sobald die Produktion begonnen hat. Das liegt unter anderem daran, dass es keinen vernünftigen Zugang zu den Informationen gibt. Während sich die Klebedaten auf physische Punkte im dreidimensionalen Raum beziehen, können die Parameter nur im Code ausgelesen werden. Es ist unmöglich zu sehen, wo eine Änderung vorgenommen werden sollte, und noch schwieriger zu bestätigen, dass eine Korrekturmaßnahme erfolgreich war: Wenn Probleme mit der Klebeleistung auftreten, müssen die Ingenieure oft die Maschine durch jeden Schritt ihres Ablaufs führen und versuchen herauszufinden, was falsch gelaufen ist. Das ist zeit- und kostenintensiv und liefert keine zufriedenstellenden Ergebnisse.
Mit der Visualisierung aller für Klebeprozesse relevanten Parametern können Hersteller viel Zeit und Geld sparen. Schließlich dauert die Korrektur von Fehlern in der Klebeprogrammierung normalerweise Tage. Das ändert sich mit RoboLive®. Nun können Ingenieure die Klebeprozesse in 3D betrachten und sämtliche Programmierarbeiten sofort bewerten. Wenn Änderungen vorgenommen oder Korrekturen implementiert werden, können die Ergebnisse auf einen Blick überprüft werden. Das bedeutet, dass die Produktqualität signifikant verbessert werden kann, während die Ausfallzeiten verkürzt und die Kosten verringert werden können.