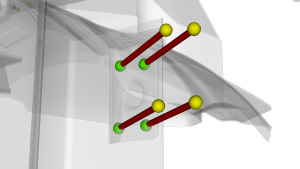
1. STARTING STATE
Robot program does not match real-world conditions.
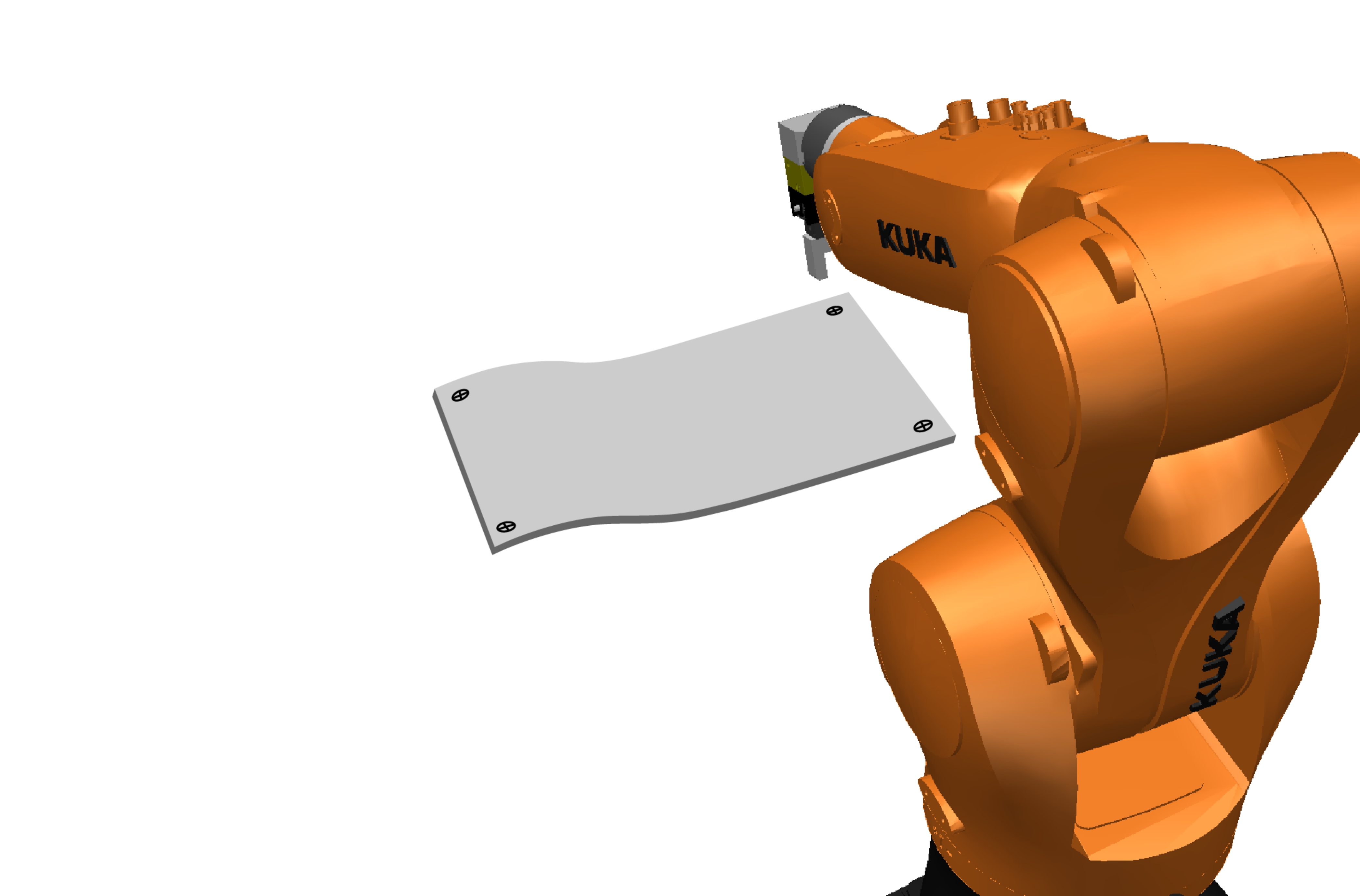
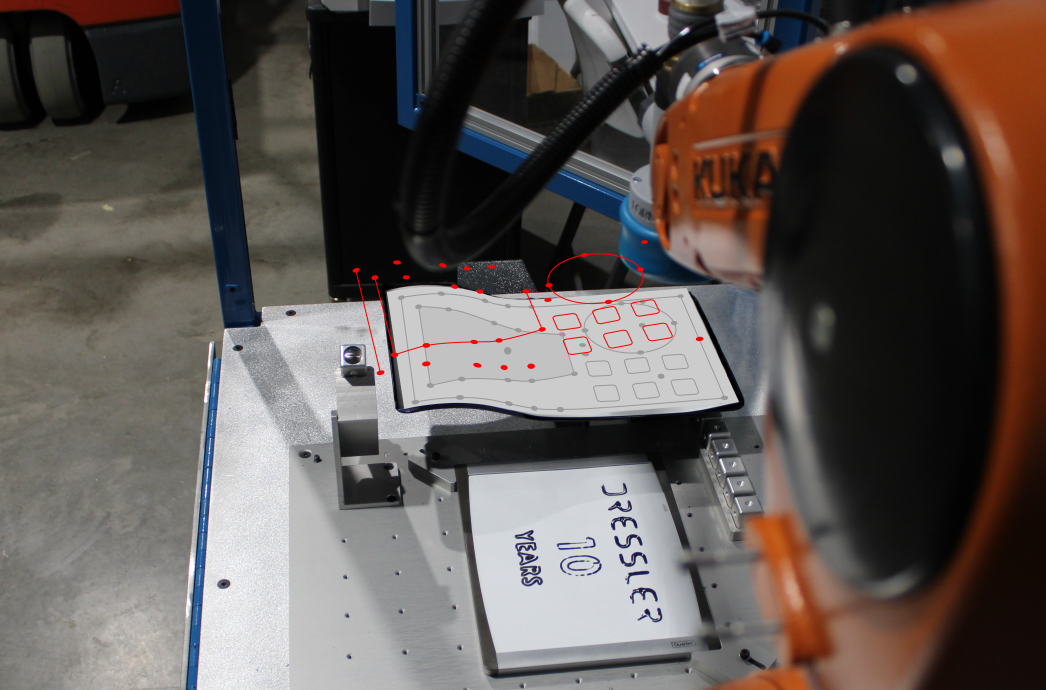
2. SIMULATION
Calibration points are created in the simulated environment.

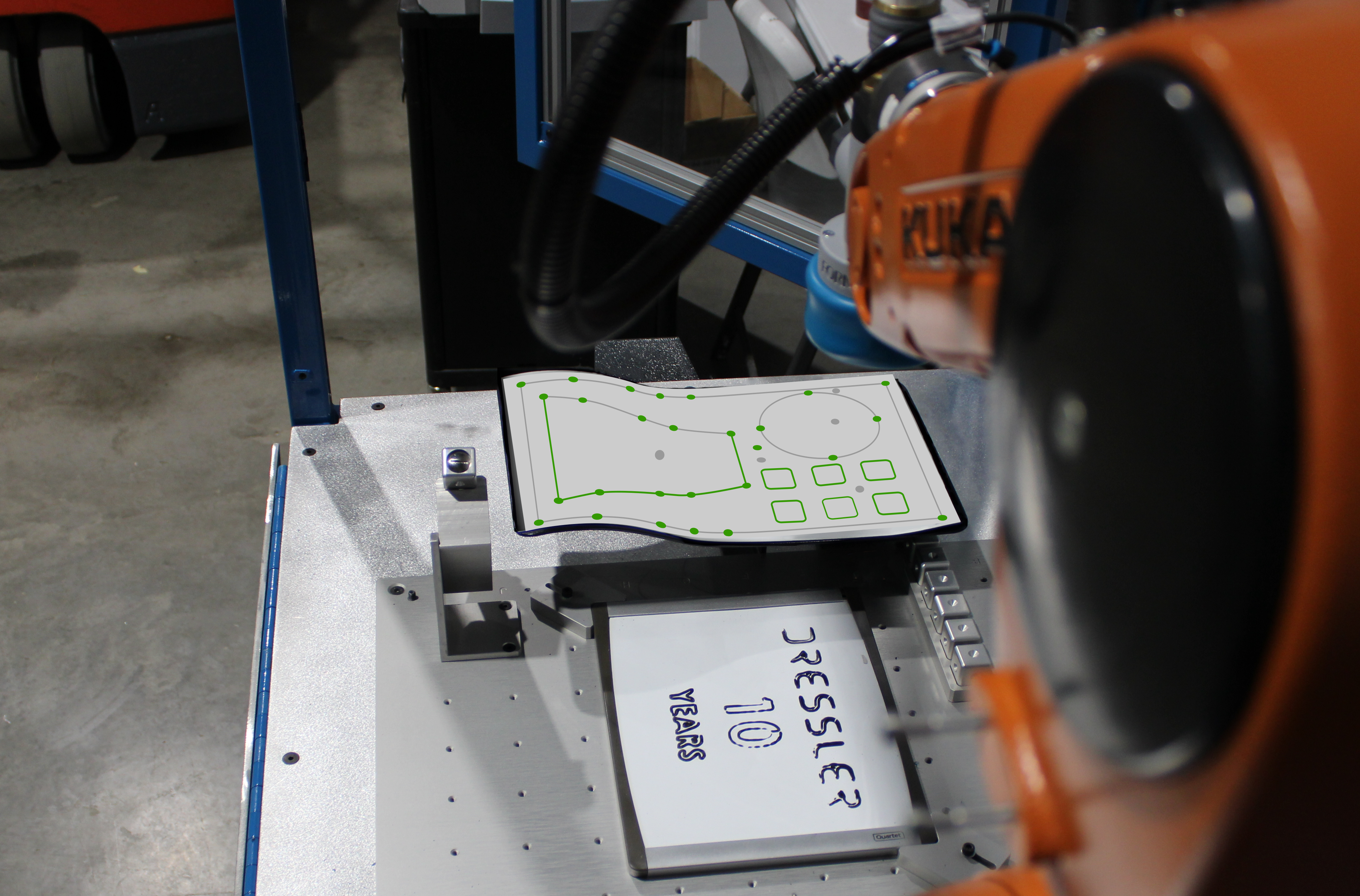
3. PROGRAMMING
Calibration points are taught in reality.

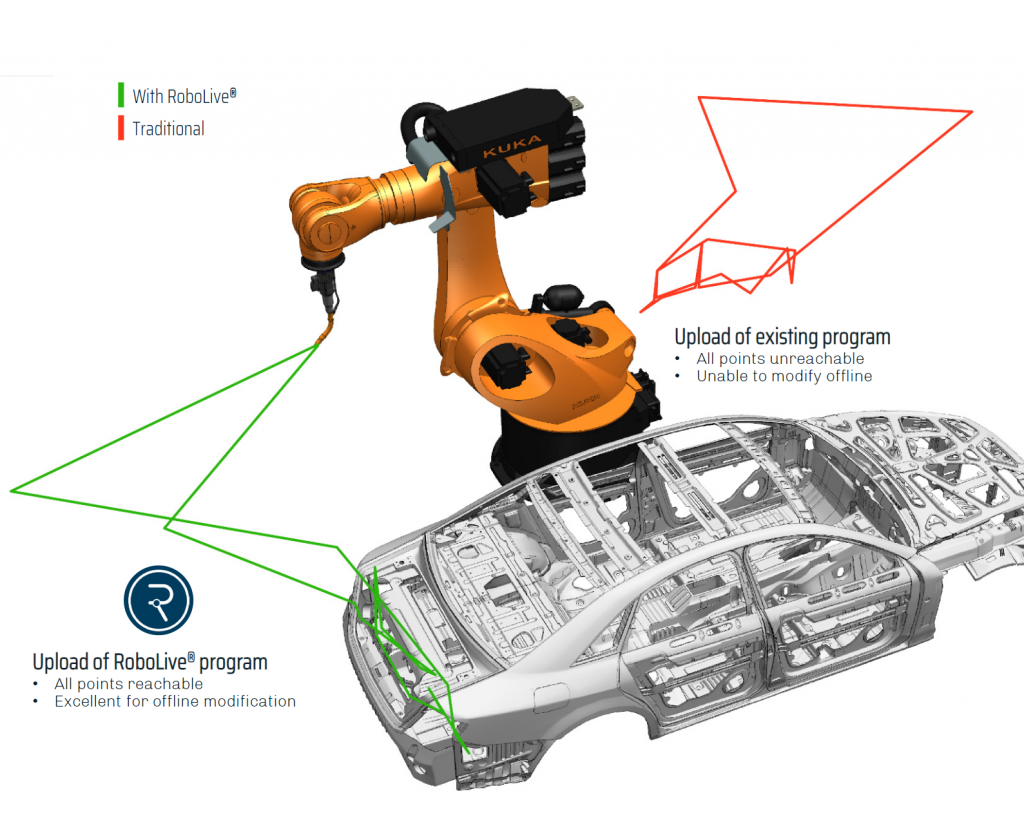
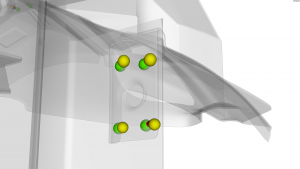
4. CALIBRATION
RoboLive® adjusts your robot program according to the calibration points.
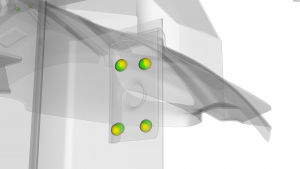
5. FINAL RESULT
The correct robot program is a perfect match for the real-world conditions.