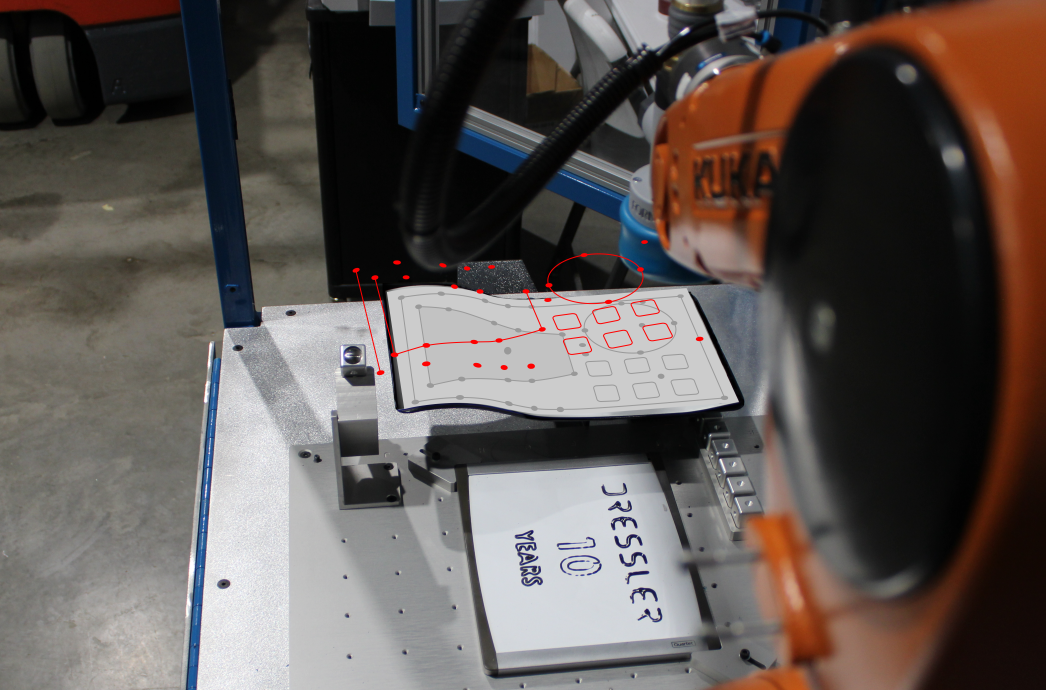
1. AUSGANGSITUATION
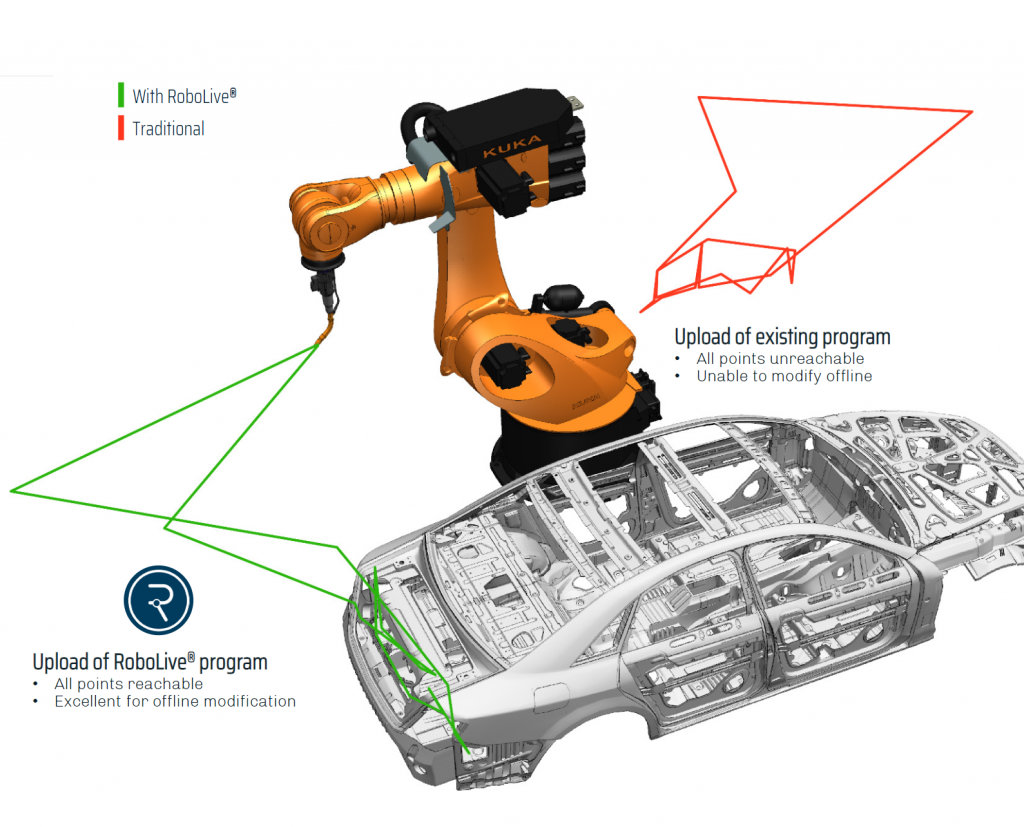
Das Roboterprogramm stimmt nicht mit realen Bedingungen überein.
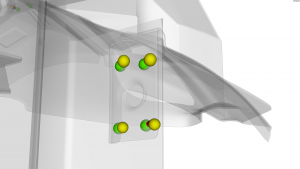
2. SIMULATION
Die Kalibrierpunkte werden in der Simulation erstellt.
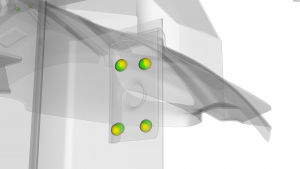
3. PROGRAMMIERUNG
Die Kalibrierpunkte
werden in der Realität geteacht.

4. KALIBRIERUNG
RoboLive® passt das Roboterprogramm entsprechend der Kalibrierpunkte an.

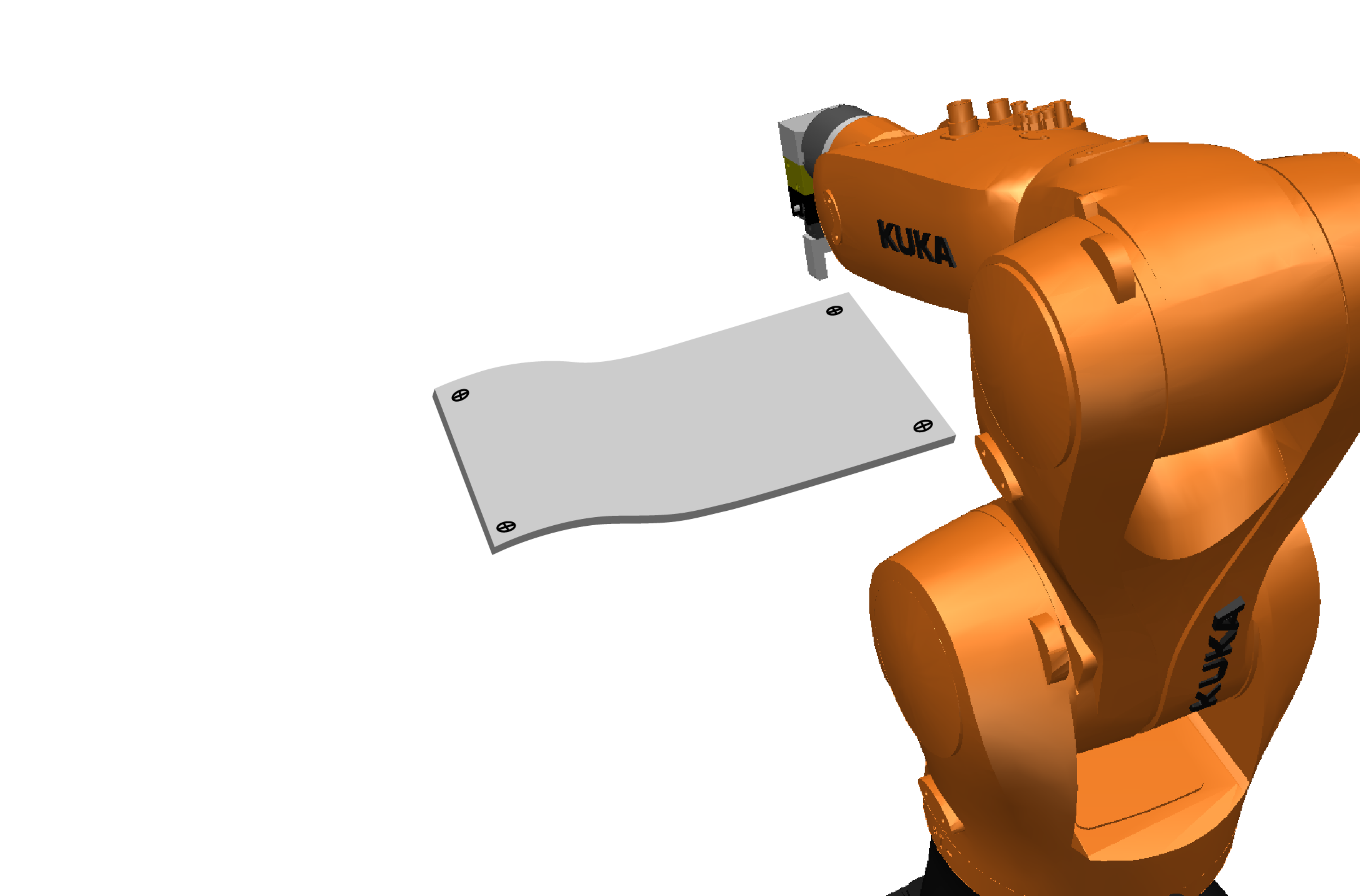
5. ENDERGEBNIS
Das Roboterprogramm stimmt mit realen Bedingungen überein.